

我发现,大家谈论5G技术时,比较容易陷入两个误区。一个是,在当前5G基站还未大规模普及的前提下,讨论5G,对5G持悲观态度;另一个是,认为5G就是让自动驾驶汽车接入比4G更快的5G网络,进而实现更快更精准的V2X(Vehicle to Everything)功能,仅此而已。
然而,V2X只利用了5G技术中最基本的“低时延”的特性,5G还有另外两个重要的特性,分别是高容量和高速率。这三个特性相辅相成,不仅会对自动驾驶的发展产生巨大影响,甚至会颠覆某些现有行业。
下面,我自动驾驶初期、发展期、成熟期,三条时间线上,谈一谈5G如何影响自动驾驶的发展。
自动驾驶初期
自动驾驶初期,也就是现阶段的自动驾驶。5G的应用就是较为成熟的V2X功能。
现阶段最能代表自动驾驶技术现状的头部玩家有两位。一位是代表了技术最前沿的谷歌L4级无人驾驶汽车,另一位是量产汽车中科技感最强的特斯拉Model系列。
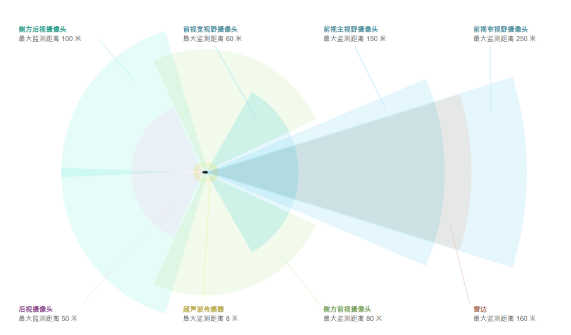
谷歌无人车装备了自研的激光雷达系统、毫米波雷达系统以及视觉感知系统。搭载了各种先进的传感器系统,就是为了获得车辆周围360°全方位的环境信息,更安全地驾驶。
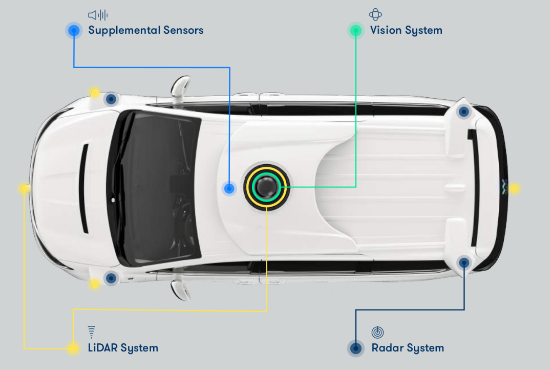
特斯拉Model的全系车型,均采用了更接近人类感知的纯视觉技术方案,每辆量产的特斯拉汽车都搭载了8个朝向车辆四周的摄像头,以及一个朝向车辆前进方向的毫米波雷达,也做到了360°全方位的环境感知。
虽然谷歌无人车和特斯拉Model都能做到360°的环境感知和特定场景下的自动驾驶,但真实的道路、交通情况远比想象的复杂。比如行人(车辆)横穿场景(俗称鬼探头)或大曲率山路这类非视距(超出传感器感知范围或在传感器感知盲区)场景。
此类复杂场景仅通过单车车载传感器是很难处理的,这会给自动驾驶带来不小的安全隐患。因此需要借助车载传感器之外的通信技术,来保证自动驾驶汽车面对复杂场景的安全性。接入5G网络的汽车,通过V2X技术,配合5G“低延迟”的特性,即可实现实时的超视距感知能力。
5G的“低延时”特性除了帮助实现自动驾驶超视距的感知能力外,还可以在安装了5G通信模块和具备线控功能的汽车上实现远程驾控,如下所示。
基于5G的远程驾控
当下的法规规定,自动驾驶大规模路测,都必须配备一个安全员在驾驶座上以保障测试的安全性。随着自动驾驶发展愈发成熟,汽车将不再配备方向盘、刹车踏板和司机的座位,且安全员的配置也将逐渐减少,这个过程也将使得远程驾控的接管车辆得到普及和应用。另一方面,远程驾控会对“代驾”这个行业产生深远影响。未来的代驾,真的可以实现足不出户,在家接单。
自动驾驶发展期
现阶段,以感知、定位、规划、控制为主的自动驾驶技术卢锡安基本已经成熟,大部分自动驾驶公司也都是基于此套技术路线实现自动驾驶的。那在自动驾驶方案都已成熟的情况下,5G如何为自动驾驶赋能呢?这就要从自动驾驶还解决不了的问题说起。
以定位问题为例,目前主流的自动驾驶定位方案是通过GPS系统的三角定位原理给出一个粗略定位,再利用传感器对环境的感知(车道线、道路边界、特征点等)与高精地图中对应的环境特征匹配,实现高精度定位。
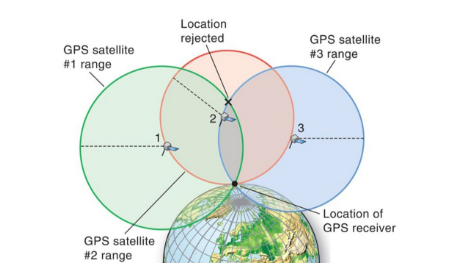
但是GPS天线会在某些严重遮挡的场景下收不到卫星信号,比如隧道、地库和高架桥下方等。如果自动驾驶系统在这类场景启动,那么它将无法获取粗略定位信息。主要原因是,GPS系统的信号源在天上,一旦遮挡就失去了信号源。
那么5G如何解决自动驾驶汽车在隧道、地库和高架桥下方的定位问题呢?那就要依靠基于5G实现的高精定位技术。
5G从关键技术上使用新的编码方式、波束赋形、大规模天线阵列、毫米波频谱等,具有大带宽,有利于参数估计,为高精度距离测量提供支持,引入大规模天线技术,基站可装配128个天线单元,为高精度角度测量提供基础。5G将实现密集组网,基站密度显著提高,用户信号可被多个基站同时接收到,这将有利于多基站协作实现高精度定位。
从引用内容可以看出,利用5G实现高精定位的关键因素是高密度的5G基站。通过5G天线与多个基站通信,在知道基站真实经纬度位置的情况下,配合5G的低延迟,即可实时解算出自动驾驶汽车的位置和姿态信息,最关键的一点是不再受遮挡的限制。
对自动驾驶来说,感知问题,某种意义上是交通参与者的定位问题。当基于5G的实时高精定位解算技术成熟且广泛应用后,自动驾驶环境中的交通参与者可通过实时共享自己的定位,与其他交通参与者实现交互,很多因遮挡导致的感知问题也将迎刃而解。
5G的高精定位技术除了能促进自动驾驶外,还将对室内场景下的商品导引、个性化广告推送、灾害救援等行业产生深远影响,这里就不展开了。
自动驾驶成熟期
一旦自动驾驶进入成熟期,技术问题将不再是阻碍。这时候就需要着重考虑商业上的问题——如何在保证功能的前提下,利用现有技术降低成本、提高利润。
自动驾驶系统,成本主要集中在两大块。一块是以摄像头、激光雷达、毫米波雷达为主的车载传感器,另一块是自动驾驶的域控制器,也就是我们常说的计算平台。
再怎么降成本,也不能打传感器的注意,因为传感器是感知信息的输入源。那么只能从自动驾驶的域控制器上想办法了。
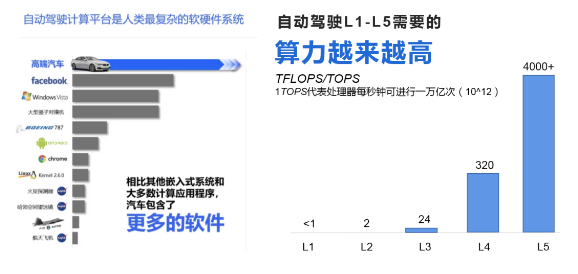
此处引用知乎上的一张图,即自动驾驶的等级越高,对算力的要求会更高。算力不仅体现在更强劲的CPU、更多的GPU这种实实在在的投入,还需要更稳定的电源驱动,以及更合理的散热结构。因此域控制器占据了自动驾驶系统的很大一部分成本。
域控制器的性价比很低。它拥有十分强大算力资源,但只有自动驾驶时才会被使用到,剩下的时间都因停车而闲置。从资源利用率的角度来说,这是一种极大的浪费。
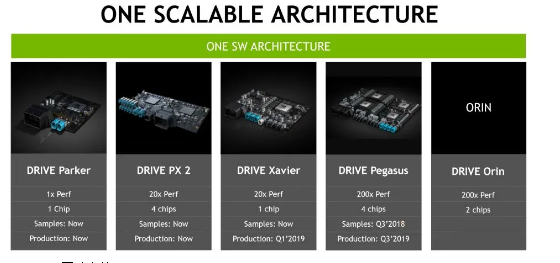
另外,随着车载摄像头的分辨率越来越高、激光雷达的激光线束越来越多,车端所需要处理的数据量也越来越大,对算力的要求会越来越高。在未来,即使域控制器做到量产,其成本也并不容易降下来。如下所示,为NVIDIA推出的连续5代、算力不断增加的自动驾驶域控制器(一台PX2在刚推出时需要20万RMB)。
面对域控制器高居不下的成本的困境,该如何利用5G技术解决呢?下面是我设想的一种方式。
在自动驾驶汽车上,配备一个处理紧急情况的低成本控制器,而将对算力要求巨大的计算资源部署在云端,在汽车自动驾驶时,向云端申请计算资源,而在关闭自动驾驶或停车时再释放掉这部分资源。这种方式不仅能够减少自动驾驶汽车本身所需的硬件成本,还能实现云端资源的一机多用。这种方式的核心思路与现阶段正火热的“云计算”类似。
但现阶段的“云计算”有个缺陷,对于大规模的数据,必须先将数据提前上传至平台上,再做处理,难以做到实时。借助5G的“高速率”特性,高带宽带来的“高速率”刚好能够弥补这种非实时的缺点,使得5G+自动驾驶+云计算的低成本自动驾驶方案成为可能。
这样一来,为自动驾驶汽车提供域控制器的Tier1供应商,其市场份额就可能被提供云计算服务的公司蚕食掉。这就印证了这么一句话:打败你的不一定是同行,也可能是跨界。